Moviendo un motor paso a paso con el puerto paralelo sin integrados
Para rotar un motor PAP Bipolar tenemos que dar pulsos
secuenciales en sus 4 cables (Que llamaremos A, B, C y D), pero alternando la
polaridad, por lo que la circuito necesario se complica un poco, mientras que
para los Unipolares este problema desaparece, así que empezaremos con uno de
estos.
Unipolares
Esquema de conexión en el puerto paralelo:
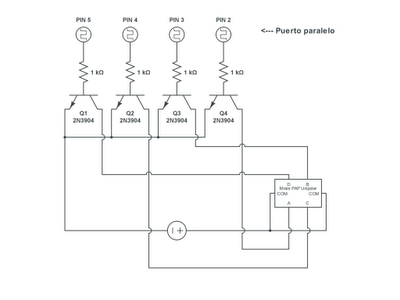
Merece la pena aclarar que los pines del esquema son los mismos correspondientes
del puerto paralelo, y que estamos usando el nibble bajo del byte del puerto.
Además, se puede ver como los 2 cables comunes del motor unipolar se conectan
al positivo de la fuente de alimentación, la cual corresponde con la tensión que
requiere nuestro motor (en mi caso 9V), y los cables A,B,C y D serán conectados
al negativo de la fuente al saturarse los transistores con la señal del puerto.
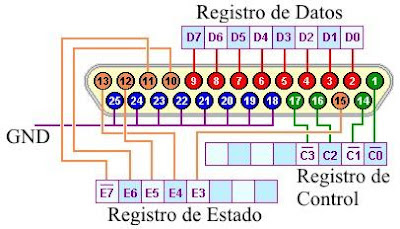
Aquí se puede apreciar en color rojo los 8 pines de datos del puerto, de los
cuales hemos usado 4 (del pin 2 al 5) es decir 4 bits.
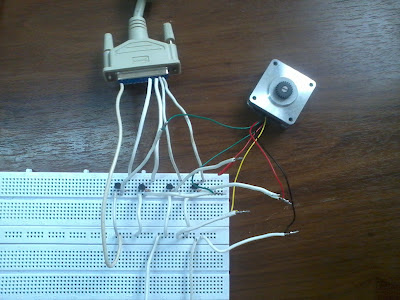
Aquí se pude observar el circuito montado y usando un cable de
puerto paralelo de una vieja impresora.

Código
Con el circuito montado lo que necesitamos ahora es el código que saque las
señales correctas en el orden correcto por el puerto paralelo para mover nuestro
motor, y tomando en cuenta también los distintos modos a los que puede trabajar
el motor (Simple Step, Double Step, Half Step).
Secuencias
- Simple Step:
A-B-C-D
- Double Step:
AB-BC-CD-DA
- Half Step:
A-AB-B-BC-C-CD-D-DA
El código no pretende ser un ejemplo de elegancia ni mucho menos, pero
funciona. Es solamente una clase, la cual usaremos con otro código para
controlar el motor.
/*
* =====================================================================================
*
* Filename: unipolar.cpp
*
* Description: Clase para mover un motor PAP Unipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/28/12 11:44:21
* Revision: none
* Compiler: g++
* License: GPLv3
*
* Author: Daniel Campoverde Carrión
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include <sys/io.h>
#include <unistd.h>
#define puerto (0x378) //Puede ser (0x278)
//datos sacados por el nibble bajo del puerto paralelo
//A,B,C,D son los cables del motor PAP
#define A 1
#define B 2
#define C 4
#define D 8
#define AB 3
#define BC 6
#define CD 12
#define DA 9
using namespace std;
class motor_unipolar{
public:
//steps=Numero de pasos del motor,type_step[0=simple,1=double.2=half]
motor_unipolar( int steps, int type_step=1);
int step( int steps = 1, int direction = 0, int rate_step = 25000); ///pasos a dar,direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
int rotate( int angle = 1, int direction = 0, int rate_step = 25000);///angulo a rotar (degrees),direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
void stop(){ outb(puerto,0);} //poner a 0 el puerto
private:
int motor_steps;
int step_type;
float angle_by_step;
int sequence[8];
int *current_step;
void single_step( int direction);
int forward_sequence();
void backward_sequence();
};
motor_unipolar::motor_unipolar( int steps, int type_step) : motor_steps(steps), step_type(type_step), angle_by_step(360/steps){
if(ioperm(puerto,1,1)){ //Abrir puerto y configurar permisos
cout << "Error de permisos" << endl << flush;
}
switch(step_type){
case 0:
sequence[0] = A; //Secuencia simple_step
sequence[1] = B;
sequence[2] = C;
sequence[3] = D;
sequence[4] = 0;
sequence[5] = 0;
sequence[6] = 0;
sequence[7] = 0;
break;
case 1:
sequence[0] = AB; //Secuencia double_step
sequence[1] = BC;
sequence[2] = CD;
sequence[3] = DA;
sequence[4] = 0;
sequence[5] = 0;
sequence[6] = 0;
sequence[7] = 0;
break;
case 2:
sequence[0] = A; //Secuencia half_step
sequence[1] = AB;
sequence[2] = B;
sequence[3] = BC;
sequence[4] = C;
sequence[5] = CD;
sequence[6] = D;
sequence[7] = DA;
break;
}
current_step = sequence;//colocamos el paso actual al principio de la secuencia
}
int motor_unipolar::step( int steps, int direction, int rate_step){
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
cout << *current_step << endl << flush;
}
return 0;
}
int motor_unipolar::rotate( int angle, int direction, int rate_step){
int steps = int(angle/angle_by_step);
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_unipolar::forward_sequence(){
if(current_step==&sequence[7] || *current_step == 0){ current_step = sequence; return 0;} //reiniciamos la secuencia
current_step++; //avanzamos en la secuencia
if(*current_step == 0){ current_step = sequence; return 0;}
return 0;
}
void motor_unipolar::backward_sequence(){
if(current_step==&sequence[0]) current_step = &sequence[7]; //reiniciamos la secuencia
current_step--; //avanzamos en la secuencia
if(*current_step==0) backward_sequence();
}
void motor_unipolar::single_step( int direction){
outb(*current_step,puerto);
if(direction==0){ forward_sequence();}
else{backward_sequence();}
}
int main(){
int opcion;
motor_unipolar motor(200);
int direccion;
int valor;
for(;;){
cout << "\n\n\nAngulo, Pasos, Salir[0,1,2]\n >> ";
cin >> opcion;
cout << "Valor (angulo o pasos)\n >> ";
cin >> valor;
cout << "Direccion[0,1]\n >> ";
cin >> direccion;
if(opcion==0){
cout << "Rotando..." << endl;
motor.rotate(valor,direccion);
}else if(opcion==1){
motor.step(valor,direccion);
cout << "Rotando..." << endl;
}else{ motor.stop(); return 0;}
}
}
Bipolares
Esquema de conexión en el puerto paralelo:
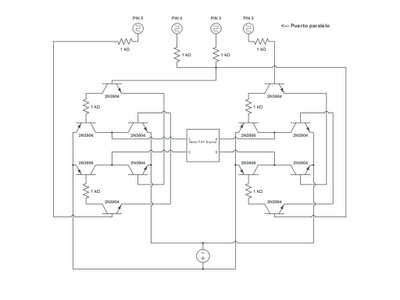
Aquí he implementado 2 puentes H de transistores para controlar ambas bobinas
del motor, alternando las polaridades usando nuevamente 4 pines de los 8 del
puerto.
Código
En este caso el código es más simple ya que en los motores PAP Bipolares no
tenemos distintos modos de paso.
/*
* =====================================================================================
*
* Filename: bipolar.cpp
*
* Description: Clase para mover un motor PAP Bipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/28/12 11:44:21
* Revision: none
* Compiler: g++
* License: GPLv3
*
* Author: Daniel Campoverde CarriÃn
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include <sys/io.h>
#include <unistd.h>
#define puerto (0x378) //Puede ser (0x278)
//datos sacados por el nibble bajo del puerto paralelo
//A,B,C,D son los cables del motor PAP
#define A 1 //bobina 1 polaridad 1
#define B 2 //bobina 1 polaridad 2
#define C 4 //bobina 2 polaridad 1
#define D 8 //bobina 2 polaridad 2
using namespace std;
class motor_bipolar{
public:
//steps=Numero de pasos del motor
motor_bipolar( int steps);
int step( int steps = 1, int direction = 0, int rate_step = 25000); ///pasos a dar,direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
int rotate( int angle = 1, int direction = 0, int rate_step = 25000);///angulo a rotar (degrees),direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
private:
int motor_steps;
float angle_by_step;
int sequence[4] = {A,B,C,D};
int *current_step;
void single_step( int direction);
int forward_sequence();
void backward_sequence();
};
motor_bipolar::motor_bipolar( int steps) : motor_steps(steps), angle_by_step(360/steps), current_step(sequence){
if(ioperm(puerto,1,1)){ //Abrir puerto y configurar permisos
cout << "Error de permisos" << endl << flush;
}
}
int motor_bipolar::step( int steps, int direction, int rate_step){
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_bipolar::rotate( int angle, int direction, int rate_step){
int steps = int(angle/angle_by_step);
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_bipolar::forward_sequence(){
if(current_step==&sequence[4]){ current_step = sequence; return 0;} //reiniciamos la secuencia
current_step++; //avanzamos en la secuencia
return 0;
}
void motor_bipolar::backward_sequence(){
if(current_step==&sequence[0]) current_step = &sequence[4]; //reiniciamos la secuencia
current_step--; //avanzamos en la secuencia
}
void motor_bipolar::single_step( int direction){
outb(*current_step,puerto);
if(direction==0){ forward_sequence();}
else{backward_sequence();}
}
Haciendo girar el motor
Ahora que tenemos las clases necesarias para mover el motor, cuyo circuito ya
tenemos montado en el puerto paralelo, usaremos un programa que a su vez
aproveche dichas clases para jugar con el motor.
Así que ha manera de ejemplo, he agregado la función main() para la fuente de
unipolar.cpp, quedando así:
/*
* =====================================================================================
*
* Filename: rotate.cpp
*
* Description: Ejemplo para mover un motor PAP Unipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/29/12 16:39:05
* Revision: none
* Compiler: gcc
* License: GPLv3
*
* Author: Daniel Campoverde CarriÃn
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include "unipolar.cpp"
using namespace std;
int main(int argc, char *argv[]){
bool angulo=false;
bool pasos=false;
motor_unipolar motor(200);
int direccion;
int valor;
if(argc < 4){ cout << "args"; return 1;}
for(int i = 0; i<argc; i++){
if(argv[i]=="-a"){ angulo=true; valor = int(argv[i+1]); }
if(argv[i]=="-p"){ pasos=true; valor = int(argv[i+1]); }
if(argv[i]=="-d"){
if(argv[i+1]=="IZQ") direccion = 1;
if(argv[i+1]=="DER") direccion = 0;
}
}
if(pasos){
motor.step(valor,direccion);
}else if(angulo){
motor.rotate(valor,direccion);
}
}
Una vez compilado con g++ unipolar.cpp -o rotate, lo ejecutamos obteniendo
este resultado:
Para rotar un motor PAP Bipolar tenemos que dar pulsos secuenciales en sus 4 cables (Que llamaremos A, B, C y D), pero alternando la polaridad, por lo que la circuito necesario se complica un poco, mientras que para los Unipolares este problema desaparece, así que empezaremos con uno de estos.
Unipolares
Esquema de conexión en el puerto paralelo:
Merece la pena aclarar que los pines del esquema son los mismos correspondientes del puerto paralelo, y que estamos usando el nibble bajo del byte del puerto. Además, se puede ver como los 2 cables comunes del motor unipolar se conectan al positivo de la fuente de alimentación, la cual corresponde con la tensión que requiere nuestro motor (en mi caso 9V), y los cables A,B,C y D serán conectados al negativo de la fuente al saturarse los transistores con la señal del puerto.
Aquí se puede apreciar en color rojo los 8 pines de datos del puerto, de los cuales hemos usado 4 (del pin 2 al 5) es decir 4 bits.
Aquí se pude observar el circuito montado y usando un cable de puerto paralelo de una vieja impresora.
Código
Con el circuito montado lo que necesitamos ahora es el código que saque las señales correctas en el orden correcto por el puerto paralelo para mover nuestro motor, y tomando en cuenta también los distintos modos a los que puede trabajar el motor (Simple Step, Double Step, Half Step).
Secuencias
- Simple Step:
A-B-C-D - Double Step:
AB-BC-CD-DA - Half Step:
A-AB-B-BC-C-CD-D-DA
El código no pretende ser un ejemplo de elegancia ni mucho menos, pero funciona. Es solamente una clase, la cual usaremos con otro código para controlar el motor.
/*
* =====================================================================================
*
* Filename: unipolar.cpp
*
* Description: Clase para mover un motor PAP Unipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/28/12 11:44:21
* Revision: none
* Compiler: g++
* License: GPLv3
*
* Author: Daniel Campoverde Carrión
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include <sys/io.h>
#include <unistd.h>
#define puerto (0x378) //Puede ser (0x278)
//datos sacados por el nibble bajo del puerto paralelo
//A,B,C,D son los cables del motor PAP
#define A 1
#define B 2
#define C 4
#define D 8
#define AB 3
#define BC 6
#define CD 12
#define DA 9
using namespace std;
class motor_unipolar{
public:
//steps=Numero de pasos del motor,type_step[0=simple,1=double.2=half]
motor_unipolar( int steps, int type_step=1);
int step( int steps = 1, int direction = 0, int rate_step = 25000); ///pasos a dar,direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
int rotate( int angle = 1, int direction = 0, int rate_step = 25000);///angulo a rotar (degrees),direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
void stop(){ outb(puerto,0);} //poner a 0 el puerto
private:
int motor_steps;
int step_type;
float angle_by_step;
int sequence[8];
int *current_step;
void single_step( int direction);
int forward_sequence();
void backward_sequence();
};
motor_unipolar::motor_unipolar( int steps, int type_step) : motor_steps(steps), step_type(type_step), angle_by_step(360/steps){
if(ioperm(puerto,1,1)){ //Abrir puerto y configurar permisos
cout << "Error de permisos" << endl << flush;
}
switch(step_type){
case 0:
sequence[0] = A; //Secuencia simple_step
sequence[1] = B;
sequence[2] = C;
sequence[3] = D;
sequence[4] = 0;
sequence[5] = 0;
sequence[6] = 0;
sequence[7] = 0;
break;
case 1:
sequence[0] = AB; //Secuencia double_step
sequence[1] = BC;
sequence[2] = CD;
sequence[3] = DA;
sequence[4] = 0;
sequence[5] = 0;
sequence[6] = 0;
sequence[7] = 0;
break;
case 2:
sequence[0] = A; //Secuencia half_step
sequence[1] = AB;
sequence[2] = B;
sequence[3] = BC;
sequence[4] = C;
sequence[5] = CD;
sequence[6] = D;
sequence[7] = DA;
break;
}
current_step = sequence;//colocamos el paso actual al principio de la secuencia
}
int motor_unipolar::step( int steps, int direction, int rate_step){
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
cout << *current_step << endl << flush;
}
return 0;
}
int motor_unipolar::rotate( int angle, int direction, int rate_step){
int steps = int(angle/angle_by_step);
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_unipolar::forward_sequence(){
if(current_step==&sequence[7] || *current_step == 0){ current_step = sequence; return 0;} //reiniciamos la secuencia
current_step++; //avanzamos en la secuencia
if(*current_step == 0){ current_step = sequence; return 0;}
return 0;
}
void motor_unipolar::backward_sequence(){
if(current_step==&sequence[0]) current_step = &sequence[7]; //reiniciamos la secuencia
current_step--; //avanzamos en la secuencia
if(*current_step==0) backward_sequence();
}
void motor_unipolar::single_step( int direction){
outb(*current_step,puerto);
if(direction==0){ forward_sequence();}
else{backward_sequence();}
}
int main(){
int opcion;
motor_unipolar motor(200);
int direccion;
int valor;
for(;;){
cout << "\n\n\nAngulo, Pasos, Salir[0,1,2]\n >> ";
cin >> opcion;
cout << "Valor (angulo o pasos)\n >> ";
cin >> valor;
cout << "Direccion[0,1]\n >> ";
cin >> direccion;
if(opcion==0){
cout << "Rotando..." << endl;
motor.rotate(valor,direccion);
}else if(opcion==1){
motor.step(valor,direccion);
cout << "Rotando..." << endl;
}else{ motor.stop(); return 0;}
}
}Bipolares
Esquema de conexión en el puerto paralelo:
Aquí he implementado 2 puentes H de transistores para controlar ambas bobinas del motor, alternando las polaridades usando nuevamente 4 pines de los 8 del puerto.
Código
En este caso el código es más simple ya que en los motores PAP Bipolares no tenemos distintos modos de paso.
/*
* =====================================================================================
*
* Filename: bipolar.cpp
*
* Description: Clase para mover un motor PAP Bipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/28/12 11:44:21
* Revision: none
* Compiler: g++
* License: GPLv3
*
* Author: Daniel Campoverde CarriÃn
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include <sys/io.h>
#include <unistd.h>
#define puerto (0x378) //Puede ser (0x278)
//datos sacados por el nibble bajo del puerto paralelo
//A,B,C,D son los cables del motor PAP
#define A 1 //bobina 1 polaridad 1
#define B 2 //bobina 1 polaridad 2
#define C 4 //bobina 2 polaridad 1
#define D 8 //bobina 2 polaridad 2
using namespace std;
class motor_bipolar{
public:
//steps=Numero de pasos del motor
motor_bipolar( int steps);
int step( int steps = 1, int direction = 0, int rate_step = 25000); ///pasos a dar,direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
int rotate( int angle = 1, int direction = 0, int rate_step = 25000);///angulo a rotar (degrees),direccion[0=horario,1=antihorario],tiempo entre paso y paso(microsegundos)
private:
int motor_steps;
float angle_by_step;
int sequence[4] = {A,B,C,D};
int *current_step;
void single_step( int direction);
int forward_sequence();
void backward_sequence();
};
motor_bipolar::motor_bipolar( int steps) : motor_steps(steps), angle_by_step(360/steps), current_step(sequence){
if(ioperm(puerto,1,1)){ //Abrir puerto y configurar permisos
cout << "Error de permisos" << endl << flush;
}
}
int motor_bipolar::step( int steps, int direction, int rate_step){
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_bipolar::rotate( int angle, int direction, int rate_step){
int steps = int(angle/angle_by_step);
while(steps > 0){
single_step(direction);
usleep(rate_step);
steps--;
}
return 0;
}
int motor_bipolar::forward_sequence(){
if(current_step==&sequence[4]){ current_step = sequence; return 0;} //reiniciamos la secuencia
current_step++; //avanzamos en la secuencia
return 0;
}
void motor_bipolar::backward_sequence(){
if(current_step==&sequence[0]) current_step = &sequence[4]; //reiniciamos la secuencia
current_step--; //avanzamos en la secuencia
}
void motor_bipolar::single_step( int direction){
outb(*current_step,puerto);
if(direction==0){ forward_sequence();}
else{backward_sequence();}
}Haciendo girar el motor
Ahora que tenemos las clases necesarias para mover el motor, cuyo circuito ya tenemos montado en el puerto paralelo, usaremos un programa que a su vez aproveche dichas clases para jugar con el motor.
Así que ha manera de ejemplo, he agregado la función main() para la fuente de
unipolar.cpp, quedando así:
/*
* =====================================================================================
*
* Filename: rotate.cpp
*
* Description: Ejemplo para mover un motor PAP Unipolar por puerto paralelo
*
* Version: 1.0
* Created: 09/29/12 16:39:05
* Revision: none
* Compiler: gcc
* License: GPLv3
*
* Author: Daniel Campoverde CarriÃn
* Organization: Silly Bytes
*
* =====================================================================================
*/
#include <iostream>
#include "unipolar.cpp"
using namespace std;
int main(int argc, char *argv[]){
bool angulo=false;
bool pasos=false;
motor_unipolar motor(200);
int direccion;
int valor;
if(argc < 4){ cout << "args"; return 1;}
for(int i = 0; i<argc; i++){
if(argv[i]=="-a"){ angulo=true; valor = int(argv[i+1]); }
if(argv[i]=="-p"){ pasos=true; valor = int(argv[i+1]); }
if(argv[i]=="-d"){
if(argv[i+1]=="IZQ") direccion = 1;
if(argv[i+1]=="DER") direccion = 0;
}
}
if(pasos){
motor.step(valor,direccion);
}else if(angulo){
motor.rotate(valor,direccion);
}
}Una vez compilado con g++ unipolar.cpp -o rotate, lo ejecutamos obteniendo
este resultado: